
Diseño de un sistema óptico infrarrojo compacto con alta relación de zoom
Apunta a varios problemas existentes en las estructuras de zoom comúnmente utilizadas al realizar un zoom continuo a gran escala. A partir de la teoría básica del diseño de sistemas de zoom, se propone un modelo de aumento variable en serie de dos etapas que se puede utilizar en el diseño de un sistema óptico de relación variable grande, y la ecuación de zoom correspondiente y las condiciones y métodos de control óptimos para el diseño de curvas de levas. son dados.
El modelo se compone de un grupo frontal de zoom continuo de dos elementos y un grupo trasero de imágenes secundarias con función de aumento variable en serie. Se mueven el primer grupo de zoom y el grupo de compensación del grupo frontal; se mueven el grupo de compensación y el segundo grupo de zoom.
El grupo de zoom secundario del grupo de imágenes realiza una ampliación secundaria en la distancia focal del grupo frontal para ampliar la capacidad de zoom de todo el sistema de imágenes. Al mismo tiempo, el grupo de imágenes secundario también comprime la apertura de la lente del objetivo para garantizar la coincidencia del tope en frío.
Se completó el diseño de un gran sistema óptico de zoom continuo de relación variable. La banda de trabajo del sistema es de 3,7~4,8μm. Adopta un detector de matriz de área de enfriamiento de 640x480, el tamaño de píxel es de 15 um, el número F es constante en 4 y puede alcanzar un ángulo de visión horizontal de 6,5-455 mm. La función de zoom continuo de 0,92°-58,2°, hasta 70 veces, utiliza sólo dos materiales, diez lentes y una longitud total de 300 mm. Tiene una excelente calidad de imagen y características de tolerancia.
El límite superior del zoom del sistema óptico de zoom de dos elementos es de aproximadamente 50 veces. Si supera este valor. Durante el movimiento axial del grupo de zoom, el cambio del ángulo de la luz sobre la superficie de la lente provocará grandes aberraciones, lo cual es difícil.
Corrección: el uso de una estructura de enlace de tres componentes o más puede lograr una mayor relación de zoom, pero en el diseño del sistema de enlace de múltiples grupos, la eliminación de los puntos de reproducción del zoom y el diseño y procesamiento de curvas de leva complejas se logran mediante ingeniería. mayores dificultades. Al mismo tiempo, el método de vinculación de múltiples grupos también reduce la confiabilidad de todo el sistema de imágenes.
Además, la relación de zoom del sistema óptico de zoom continuo por infrarrojos, que se utiliza ampliamente en los últimos días, es de aproximadamente 30 veces. Existen problemas comunes, como un gran recorrido del zoom y un largo tiempo de cambio del campo de visión. Es difícil controlar el salto del eje visual durante el zoom, lo que restringe en gran medida el uso generalizado de este tipo de equipo.
En respuesta a los problemas anteriores, el artículo adopta la idea de diseño de zoom de dos etapas basado en la teoría de diseño del sistema de zoom, y expone la realización de un sistema óptico de zoom continuo compacto y grande, que puede usarse como referencia para el diseño de sistemas de zoom grandes similares.
1. Base de diseño
Para facilitar la discusión, el artículo utiliza la teoría de la lente delgada para describir los modelos involucrados.
1.1 Modelo de diseño de zoom en serie de dos etapas
La Figura 1 muestra un diagrama esquemático de un modelo de diseño de zoom en serie de dos etapas. Todo el sistema óptico está compuesto por un grupo frontal de zoom continuo de dos elementos y un grupo trasero de imagen secundaria con función de aumento variable en serie.
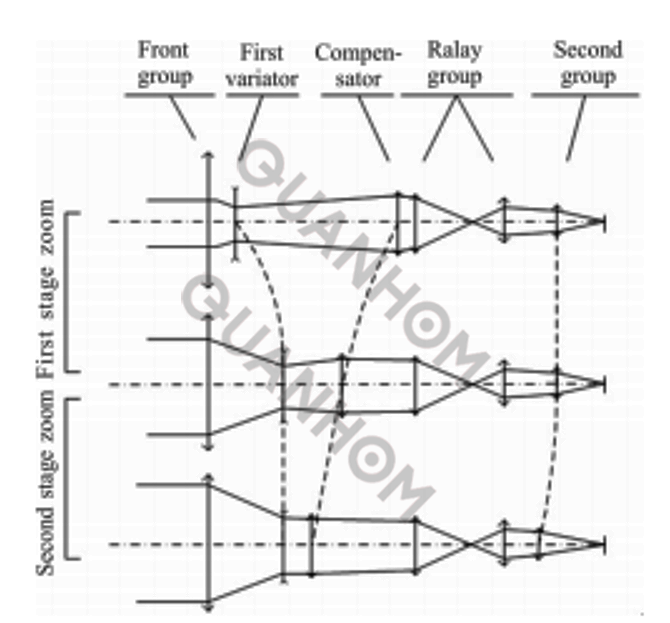
Fig.1 Esquemas del modelo de diseño de lente zoom de dos etapas en serie
El grupo frontal adopta la estructura de zoom tradicional de dos elementos para realizar el zoom de primer nivel del sistema óptico: en todo el proceso de zoom de primer nivel, solo participan los dos grupos móviles del grupo de zoom y el grupo de compensación, y la cámara tradicional Se puede utilizar el mecanismo de manguito. Cumplir con los requisitos de diseño estructural para garantizar la viabilidad del sistema.
Al hacer zoom a una determinada posición, el grupo de zoom deja de moverse y el sistema óptico cambia al segundo zoom: el grupo de compensación y el segundo grupo de zoom están diseñados de acuerdo con el diseño. Buen movimiento regular para lograr un zoom secundario en la distancia focal del grupo delantero.
En este momento. Mediante un procesamiento adecuado, la curva de movimiento de cada grupo dinámico se puede realizar una transición suave con la curva en el proceso de zoom de la primera etapa, realizado en el mismo mecanismo de manguito de leva. Se reduce la dificultad de procesamiento y control; el movimiento del grupo de zoom de la segunda etapa puede estar restringido por un manguito de leva separado o un mecanismo de guía de tornillo de avance, y tiene la función de enfocar todo el sistema óptico a través de un mecanismo de control adecuado.
Por lo tanto, a través del método de zoom en serie de dos etapas, cada etapa del proceso de zoom tiene solo dos componentes móviles, lo que mejora la capacidad de corrección de aberraciones de todo el sistema óptico, evita la obtención de imágenes de puntos ciegos en el proceso de zoom y simplifica el diseño del curva de leva El proceso proporciona una gran comodidad para la realización de la estructura óptico-mecánica.
1.2 Ecuación de zoom y solución de parámetros
El método de ecuación diferencial de zoom se utiliza para describir el modelo de diseño de dos etapas en serie para lograr una gran relación de zoom. En el modelo de diseño, el grupo de compensación participa en todo el proceso de la primera y segunda etapa de zoom, y el grupo de zoom y el grupo de zoom de segunda etapa participan en la primera y segunda etapa de zoom respectivamente.
Por lo tanto, en el proceso de diseño de la curva de leva, tome el grupo de compensación como grupo activo, el grupo de zoom y el grupo de zoom secundario como grupo impulsado, y establezca la distancia focal del grupo de zoom como f'2, la relación de aumento m2, y el movimiento axial como △2; la distancia focal del grupo de compensación es posterior a f'3, el aumento es m3, y el movimiento axial es △3; la distancia focal del grupo de zoom secundario es f'4, y la ampliación es m4.
Para el proceso de zoom de primer nivel, se realiza mediante la vinculación del grupo de zoom y el grupo de compensación, es decir:

El grupo de compensación es el grupo activo, y el cambio de la ampliación m3es causado por el cambio de la distancia del objeto, es decir:

El grupo de zoom es el grupo impulsado, y el cambio de la ampliación m2es causado por el cambio de la distancia del objeto, es decir:

Del mismo modo, para el proceso de zoom secundario, se realiza mediante la vinculación del grupo de compensación y el grupo de zoom secundario, es decir:

Dadas las condiciones iniciales, utilizando múltiples métodos para resolver las ecuaciones (1) y (4), la distribución de potencia óptica de cada componente y el zoom correspondiente se pueden obtener en las condiciones de aumento variable de primera y segunda etapa.
La curva de movimiento, y la curva de movimiento de cada componente se resuelve en secciones, lo que garantiza la continuidad de la curva, y no se repetirá aquí. Sin embargo, la solución segmentada no puede garantizar el tiempo de conmutación del zoom de dos etapas y la transición suave de la curva de movimiento debe considerarse por separado.
Tome el suavizado de las dos secciones de la curva de zoom (incluida la curva de movimiento de zoom de primer nivel y la línea recta estática de zoom de segundo nivel) como ejemplo. Para garantizar una transición suave de la curva, se requiere que las pendientes de las dos secciones de la curva en el momento de cambiar el nivel de zoom sean iguales, es decir:

Sustituyendo la fórmula (2) en la fórmula (1) se puede obtener:

Organízate para conseguir:

donde: metro22≠0. Si quieres hacerlo, m33-1=0, y considerando que m3=1 no tiene sentido, se puede ver que tomando m3=-1 puede garantizar una transición suave del grupo de zoom de dos niveles durante el cambio de zoom de dos niveles.
Lo mismo se puede demostrar: cuando m3=-1,
En este momento, se puede garantizar la transición suave del zoom de dos niveles cuando se cambia el zoom de dos niveles.
Además, para garantizar la suavidad de la curva, es necesario garantizar el proceso de zoom de primer nivel. Las curvas de movimiento del grupo de zoom y del grupo de compensación son suaves y continuas, es decir, es necesario asegurar que en el momento m3=-1, the zooming group magnification |m2|< 1.
Si se toma la posición focal corta como punto de partida, las relaciones de ampliación del grupo de zoom y el grupo de compensación en la posición focal corta se establecen en m2sy M3s, Y la fórmula (1) se resuelve por integración y se puede obtener la ampliación del grupo de zoom:

Fórmula:

Sustituyendo m3= -1 en la fórmula (8), se puede obtener el aumento m2 del grupo de aumento variable en el momento de cambiar el orden de aumento variable. En este momento, si m2Se encuentra <-1, el valor se puede modificar con m3so m2smake adjustments to satisfy |m2|≤1.
2. Ejemplo de diseño
Se selecciona un ejemplo de diseño para discutir y explicar el método anterior. El ejemplo de diseño utiliza un detector de plano focal refrigerado de infrarrojo medio de 3,7 ~ 4,8 μm, el elemento de imagen es de 640 × 480, el tamaño de píxel es de 15 μm × 15 μm y la longitud diagonal es de 12 mm. Los indicadores de diseño específicos se muestran en la Tabla 1.

La estructura principal de aumento variable del sistema óptico adopta la forma de compensación de grupo positivo; el grupo fijo frontal con potencia óptica positiva es una estructura monolítica que utiliza material de silicio con una capacidad de dispersión débil para asumir la potencia óptica principal; Teniendo en cuenta la gran relación de zoom, las aberraciones de posición focal larga y corta del sistema están equilibradas, y el grupo de aumento variable con poder refractivo negativo también utiliza silicio con una capacidad de dispersión débil.
Esto asegura que durante todo el movimiento del grupo de zoom, no introducirá demasiada aberración cromática en la posición focal corta y comprimirá el ángulo de incidencia de la luz en la superficie del grupo trasero, reduciendo la presión de la aberración del grupo trasero. corrección.
El grupo de compensación adopta una estructura típica de tres piezas compuesta de silicio-germanio-silicio de acuerdo con la distribución de potencia óptica positiva-negativa-positiva, y corrige de forma independiente la aberración cromática, la aberración esférica, la coma, etc. del grupo de lentes.
El grupo de lentes fijos del medio funciona principalmente, la función de la lente de campo es comprimir el ancho del haz y reducir el volumen del grupo de lentes de imágenes secundarias; el grupo de lentes de zoom secundario tiene un poder refractivo positivo, adopta una estructura de dos piezas, es una combinación de dos materiales de silicio y germanio y también elimina el espejo de forma independiente. Aberraciones primarias dentro del grupo.
Utilizando el software Code V para optimizar y analizar el sistema óptico anterior, la Figura 2 muestra los resultados de optimización del sistema óptico de zoom continuo de infrarrojo medio compacto y de gran relación de zoom y la evaluación MTF correspondiente. El sistema sólo utiliza dos materiales infrarrojos, silicio y germanio, y un total de 10 lentes.
La longitud total del sistema óptico desde la superficie del sistema óptico cerca del lado del objeto hasta el plano focal es de 300 mm, el diámetro máximo de la lente única es inferior a 112 mm y la tasa de distorsión máxima del zoom es inferior a 5 %.
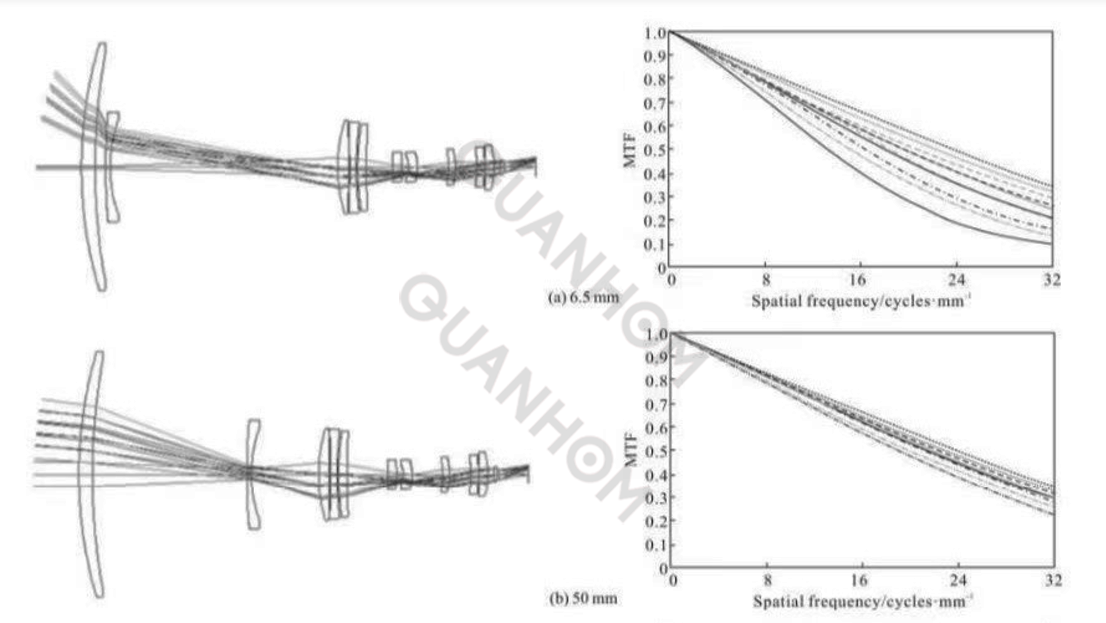
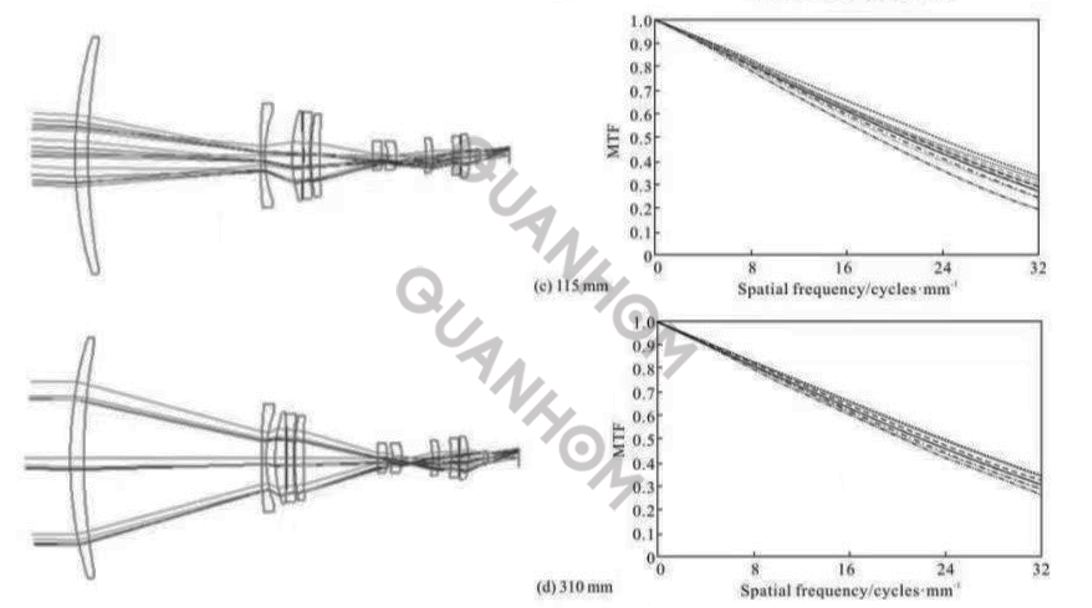
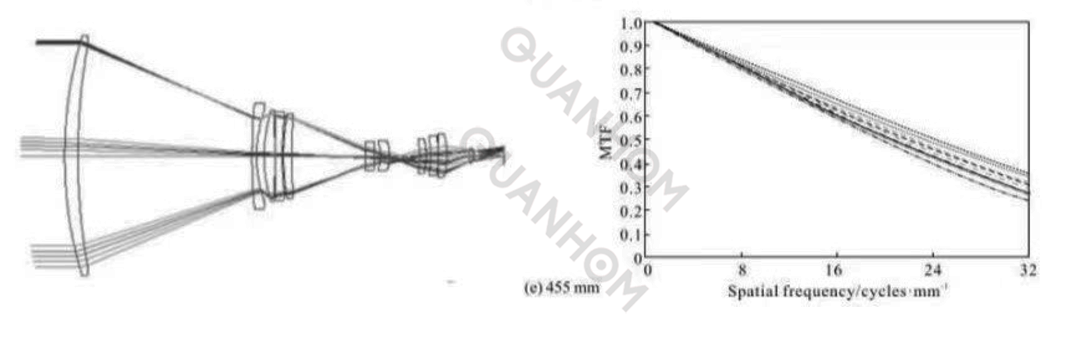
Fig.2 Resultado del diseño y rendimiento MTF correspondiente del sistema óptico MWIR compacto de alta relación de zoom
La frecuencia de corte del sistema óptico diseñado en cada posición de distancia focal es 33 1p/mm y el campo de visión central MTF es mayor que 0,28. La función de transferencia de cada campo de visión tiene una buena distribución, lo que indica que el sistema tiene una buena calidad de imagen, lo que demuestra la viabilidad del método de diseño anterior.
Utilice el programa macro compilado para optimizar el diseño de la curva de leva del sistema óptico de zoom continuo de infrarrojo medio compacto y de gran relación de zoom completo. La Figura 3 es un diagrama esquemático de la curva de leva del sistema de zoom optimizado. Se puede ver que todo el proceso de compensación del zoom del sistema de zoom es suave y sin puntos de inflexión.
Además, la reflectividad de cada superficie es 0,01, la temperatura promedio de la estructura óptico-mecánica es 20°C, la temperatura de fondo de la escena de detección es 20°C, la temperatura dentro del detector Dewar es -195,86°°C, y se adopta la diferencia de temperatura inducida por Narciso (NITD). La evaluación de las características de reflexión en frío del sistema de zoom mencionado anteriormente muestra que todo el sistema óptico en la posición focal corta, NITD≤2,85K; en la posición focal larga, NITD≤0.92K, que puede cumplir con los requisitos de aplicaciones de ingeniería.
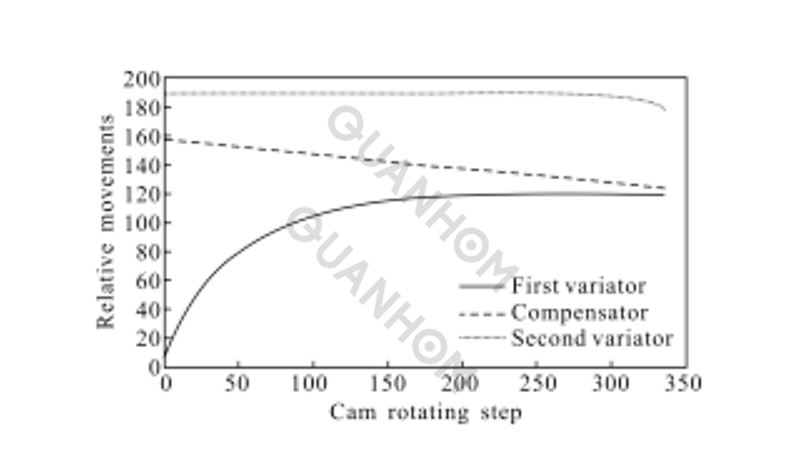
Fig.3 Curva de leva del sistema óptico MWIR con relación de zoom grande
Los requisitos de tolerancia son los siguientes: tolerancia del índice de refracción del material ± 0,001, tolerancia del número de Abbe ± 0,002; tolerancia del radio de curvatura ± 0,02 mm; tolerancia de espesor y excentricidad ± 0,02 mm; Tolerancia de inclinación ± 1'.
Los componentes y componentes están integrados con un cilindro de lente y la tolerancia de integración: tolerancia excéntrica ± 0,02 mm, tolerancia de inclinación ± 1 '; y tome el grupo de zoom de dos etapas como compensación de ajuste. En este momento, con una probabilidad de más del 90%, a la frecuencia de corte de 331p/mm, el campo de visión central MTF≥0,22 y el campo de visión del borde MTF≥0,17. El nivel de procesamiento y ensamblaje existente puede cumplir completamente con los requisitos de diseño del sistema.
Análisis y resumen de la estructura de zoom de dos elementos en la realización de un sistema óptico de gran relación de zoom de varios problemas, sobre esta base, se expone una estructura de zoom de dos etapas del método de realización del sistema óptico de zoom continuo de gran relación de zoom, y la distribución Se analizan la potencia de cada componente y el suavizado de la curva de movimiento del componente en el proceso de diseño, lo que proporciona una nueva forma para la realización del gran sistema de zoom.
Como ejemplo, se diseñó un sistema óptico compacto de zoom continuo de gran relación de zoom en infrarrojo medio. El sistema utiliza sólo dos materiales infrarrojos, silicio y germanio, para lograr una función de zoom continuo con una distancia focal que oscila entre 6,5 y 455 mm hasta 70 aumentos. Además, el sistema es de tamaño pequeño, estructura compacta, alta transmitancia y tiene buena calidad de imagen y características de tolerancia. Se espera que sea ampliamente utilizado en alerta temprana, avistamiento, seguimiento, monitoreo y otros campos. El ejemplo de diseño también muestra que el método se puede utilizar para el diseño de un sistema óptico de zoom continuo con una gran relación de zoom con requisitos similares.
Quanhom tiene muchos años de experiencia en la investigaciónlentes de zoom continuo infrarrojo, y puedo brindarle asesoramiento profesional hasta cierto punto.
Como fabricante líder deComponentes optoelectromecánicos, contamos con un equipo profesional y experimentado que desarrolla continuamente nueva tecnología infrarroja de primera clase y tiene décadas de experiencia en el diseño de productos complejos relacionados con la óptica infrarroja. Nuestras lentes infrarrojas térmicas de alta calidad (LWIR, MWIR y SWIR) son bien recibidas por los usuarios y nuestro atento servicio integral también se ha ganado los elogios y la confianza de muchos clientes. Si desea comprar nuestra lente de zoom continuo infrarrojo, ¡contáctenos de inmediato!
Autores: Qu Rui, Mei Chao, Yang Hongtao, Cao Jianzhong, Zhao Yan
Fuente de la revista: Vol.46 No.11 Ingeniería láser e infrarroja, noviembre de 2017
Fecha de recepción: 2017-03-12 fecha Fecha de revisión: 2017-04-17
Referencias:
[1] Ellis IB, James BC, Iain AN, et al. Sistema de lentes con zoom: EE. UU., 6969188 B2[P]. 2005-07-29.
[2] Neil I A. Fallos de optimización en el diseño de lentes con zoom [C]//SPIE, 1997, 3129: 158-180.
[3] Sinclair R L. Lentes con zoom de gran aumento para aplicaciones de 3 a 5 mm [C]//SPIE, 2004, 3429: 11-18.
[4] Aron Y, Boubis I, Shabit RT Un diseño novedoso de un zoom atermalizado de 1:30 de gran aumento en el MWIR [C]//SPIE, 2004, 5406: 97-106.
[5] Hyun Sook Kim, Chang Woo Kim, Seok Min Hong y otros. Cámara compacta con zoom infrarrojo de longitud de onda media con rango de zoom 20:1 y atermalización automática [J]. Opt Eng, 2002, 41(7): 1661-1667.
[6] Zhou Hao, Liu Ying, Sun Qiang y otros. Sistema óptico de zoom continuo MWIR con aumento de 45 [J]. Revista de ondas infrarrojas y milimétricas, 2014, 33(1): 68-77.
[7] Wang Haiyang, Li Li, Jin Ning, et al. Diseño de sistemas ópticos de zoom continuo MWIR con gran rango de zoom [J]. Ingeniería de infrarrojos y láser, 2013, 42(2): 398-402. (en chino)
[8] Zhang Liang. Diseño óptico para sistema de zoom infrarrojo medio [J]. Revista de Óptica Aplicada, 2006, 27 (1): 32 -34. (en chino)
[9] Tao Chunkan. Diseño del sistema óptico de enfoque de zoom [M]. Beijing: National Defense Industry Press, 1988 (en chino)
[10] Lee K H. Cálculo de primer orden para sistemas ópticos IR de imágenes [C]//SPIE, 2003, 5076: 123-129.
[11] Warren J S. Ingeniería óptica moderna: el diseño de sistemas ópticos [M]. Nueva York: McGraw-Hill, Inc., 2008.
[12] Kingslake R, Johnson R B. Fundamentos del diseño de lentes [M]. Burlington: Prensa académica, 2010.
[13] Joseph M G. Introducción al diseño de lentes con ejemplos prácticos de ZEMAX [M]. Richmond: Willmann Bell Inc., 2002.
[14] Wang Zhijiang, Gu Peisen. Manual práctico de tecnología óptica [M]. Beijing: Machinery Industry Press, 2006. (en chino)
[15] Asociados de investigación óptica. Manual de Referencia Código V [M]. Pasadena: Asociados de investigación óptica, 2009.