
Método rápido de medición de distancia focal basado en imágenes de lentes infrarrojas
La distancia focal de la lente se refiere a la distancia desde el punto principal hasta el punto focal de la óptica de la lente y es un índice de rendimiento importante de la lente. La longitud focal de la lente determina el tamaño de la imagen tomada, el tamaño del campo de visión, el tamaño de la profundidad de campo y la perspectiva de la imagen. Por lo tanto, cómo detectar con precisión la distancia focal de una lente infrarroja es un contenido de investigación importante en la detección de parámetros de lentes infrarrojas.
El método de medición de la distancia focal de lentes infrarrojas se puede dividir en método directo y método indirecto. El método indirecto consiste en derivar de forma inversa la distancia focal de la lente midiendo el ángulo de visión de la lente. Sin embargo, la premisa del método indirecto es que no hay distorsión de la lente.
En la medición real, especialmente para lentes de distancia focal pequeña, la distorsión no es despreciable, lo que conduce a la inexactitud de la distancia focal de la lente calculada mediante el método indirecto; el método directo consiste en obtener la información de la imagen de destino y luego obtener la distancia focal de la lente.
El equipo principal actual es el equipo de medición de lentes MTF. Este equipo tiene una alta precisión de medición y buena consistencia, pero el equipo es costoso, el costo de medición de la distancia focal de la lente es alto y la eficiencia es baja, lo que no favorece la detección rápida de lentes por lotes.
Con el objetivo de abordar la situación actual, este artículo propone un método de detección rápida de la distancia focal de la lente infrarroja basado en la imagen del objetivo con el filo de la navaja. Este método recopila la imagen del objetivo con filo de cuchillo en el estado enfocado de la lente infrarroja, utiliza el método de segmentación de umbral de Otsu para obtener la imagen binarizada, extrae el contorno del borde del objetivo y luego usa la transformación afín para obtener el rectángulo circunscrito mínimo correspondiente al objetivo del filo de la navaja, y el rectángulo circunscrito.
Las coordenadas del vértice se introducen en la fórmula de cálculo de la distancia focal y luego se estima la distancia focal correspondiente de la lente infrarroja. El método puede realizar una medición rápida y precisa de la distancia focal de la lente infrarroja en lotes y puede reducir efectivamente el costo de la medición de los parámetros de la lente.
1. Teoría y Método
1.1 Segmentación de umbral adaptativo
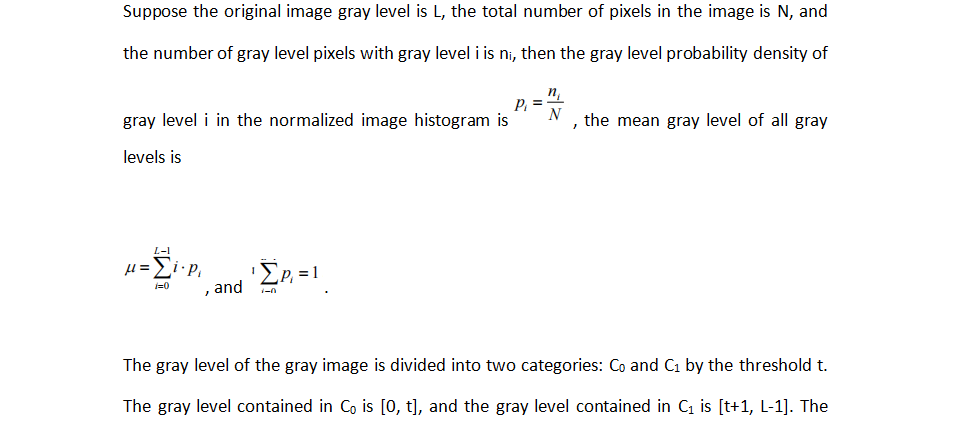
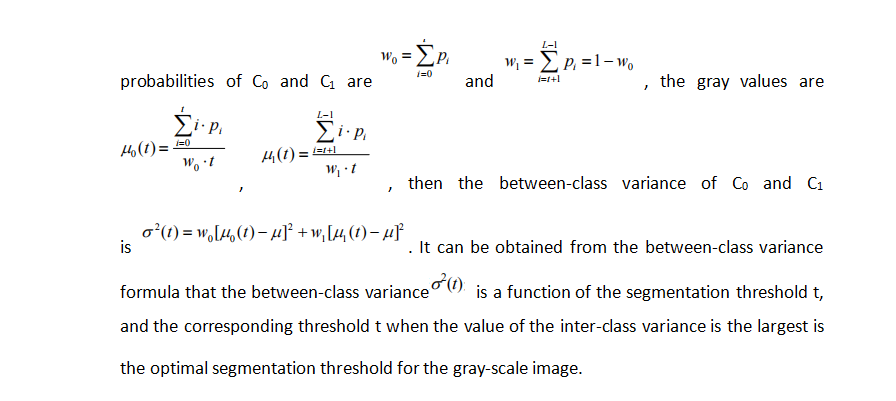
El método de máxima variación entre clases (Otsu) es un algoritmo general de detección y segmentación. En vista de la situación en la que los picos dobles del histograma gris de la imagen no tienen valles obvios o los picos y valles dobles no son obvios, el método de varianza máxima entre clases es adecuado para determinar la posición del umbral de segmentación entre los picos dobles.
Este método utiliza los momentos acumulativos de orden cero y primer orden del histograma gris de la imagen para maximizar la función discriminante y seleccionar el mejor umbral para la segmentación de la imagen.
1.2 Extracción de bordes
La extracción de bordes es un método común para segmentar imágenes basándose en mutaciones de grises de píxeles. Los métodos de extracción de bordes más utilizados incluyen el método de extracción de bordes basado en gradiente morfológico, el método de extracción de bordes de Sobel, el método de extracción de bordes de Laplaciano y el método de extracción de bordes de Canny.
El método de extracción de bordes basado en el gradiente morfológico consiste en restar el resultado de la expansión morfológica del resultado de la corrosión morfológica en la imagen para obtener la información del contorno del borde que contiene el gradiente objetivo. Esta operación cambiará el tamaño de píxel del objetivo después de obtener la imagen y afectará la precisión del cálculo.
El método de extracción de bordes de Sobel y el método de extracción de bordes de Laplaciano tienen una precisión de extracción de bordes baja cuando el núcleo de convolución es pequeño. Para núcleos de convolución más grandes, se utilizan más píxeles en el proceso de aproximación, por lo que la pérdida de tiempo es grande.
Este artículo elige el método de extracción de bordes Canny. Este método primero calcula las derivadas de primer orden en las direcciones xey, y luego las combina en 4 derivadas direccionales y combina los puntos máximos locales en las derivadas direccionales para formar píxeles candidatos de borde.
Finalmente, al extraer el contorno del borde, el método Canny utiliza dos umbrales. Si el gradiente de píxeles es mayor que el umbral mayor, se marca como un borde válido; si el gradiente de píxeles es menor que el umbral más pequeño, se marca como un borde ineficaz; si el gradiente de píxeles está entre los dos, solo cuando está conectado a un píxel de umbral alto se marca como un borde válido.
1.3 Transformación afín
La transformación afín es un método de procesamiento importante en la transformación geométrica de imágenes. Asigna cualquier paralelogramo ABCD en el plano a cualquier otro paralelogramo ABCD y mantiene la rectitud y el paralelismo de los segmentos de línea antes y después de la transformación.
Mediante la transformación afín, se pueden realizar transformaciones geométricas como traslación, rotación, expansión e inversión de la imagen. La transformación afín en el espacio euclidiano bidimensional se puede expresar como la fórmula (1). Según la fórmula (1), la transformación afín típica tiene principalmente los siguientes tipos:
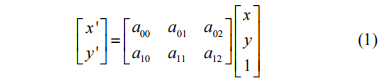
(1) Transformación traslacional. Mueva el punto (x, y) al punto (x + a, y + b), entonces la matriz de cambio es:

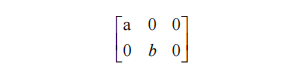
(2) Escalamiento y transformación. Si la coordenada horizontal del punto (x, y) se amplía o reduce veces, y la ordenada se amplía o reduce b veces, la matriz de transformación es:
(3) Transformación de rotación. Gire el gráfico de destino en sentido contrario a las agujas del reloj en radianes alrededor del origen, luego la matriz de transformación será:

1.4 Derivación de la fórmula de cálculo de la distancia focal
El diagrama esquemático del objetivo rectangular a través del sistema de imágenes ópticas se muestra en la Figura 1.

Fig.1 Diagrama esquemático de la imagen objetivo mediante el sistema óptico.
Donde x_target es el ancho físico del objetivo rectangular e y_target es la altura física del objetivo rectangular, ambos en mm. El tamaño de la imagen de salida del objetivo rectangular después de haber sido fotografiado por el sistema óptico es m×n, y el tamaño de píxel del objetivo en la imagen es qp y sr, y todas las unidades son píxeles. Utilizando la relación triangular del sistema de imágenes ópticas, se puede obtener la siguiente relación:

Donde: ppH es el tamaño horizontal del detector, μm; Fcolumnaes la distancia focal del tubo colimador, mm; Flenes la distancia focal de la lente infrarroja, mm. La relación entre el campo de visión horizontal instantáneo del detector y la distancia focal de la lente es la siguiente:

Por tanto, la distancia focal de la lente infrarroja:

Entre ellos, sustituyendo la ecuación (2) en la ecuación (3), se puede obtener el ángulo de visión horizontal instantáneo del detector:

2. Resultados y análisis experimentales.
El objetivo seleccionado en este artículo es un objetivo con filo de cuchillo con un radio de 16 mm, una distancia focal del colimador de 260 mm, un detector no refrigerado con una resolución de 640 × 512, una separación entre píxeles de 17 μm y una distancia focal teórica de la lente infrarroja es de 54 mm.
La Figura 2(a) es la imagen de salida del objetivo con filo de cuchillo a través del sistema de imágenes ópticas cuando la lente infrarroja está en el estado enfocado, la Figura 2(b) es el resultado de la extracción del borde del objetivo después de binarizar la imagen, y La Figura 2 (c) es la simulación objetivo. El resultado de salida después de la transformación radiográfica. De la Figura 2 (b) se puede obtener que el método puede extraer con precisión el contorno del borde del objetivo con filo de cuchillo.
Al incorporar las coordenadas de los vértices del rectángulo circunscrito del objetivo con filo de cuchillo en la Figura 2 (c) a las fórmulas de cálculo (4) y (5), la distancia focal real de la lente infrarroja de 54 mm se puede obtener como 56,1406 mm. , y la distancia focal de la lente ha sido probada por el organismo de certificación. Es 55,7360 mm, el error absoluto es 0,4046 mm y el porcentaje de error es 0,7.
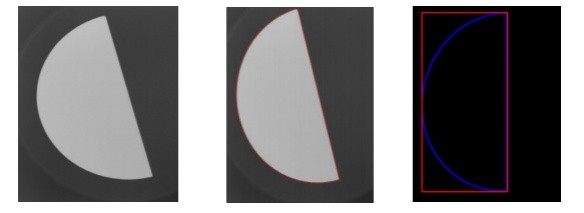
(a) La imagen original (b) Imagen después de la extracción del borde (c) Imagen después de la transformación por radiación
Fig.2 Diagrama de flujo de procesamiento de la imagen objetivo con filo de cuchillo
Para verificar la universalidad del algoritmo en este documento, se calcularon respectivamente las distancias focales de 5 lentes infrarrojas de 54 mm y 8 mm en el mismo lote y se compararon con los resultados de las pruebas del organismo de certificación, como se muestra en la Tabla 1. y Tabla 2. Combinando las fórmulas (4) y (5), los parámetros que afectan la precisión de la medición de la distancia focal de la lente infrarroja incluyen el tamaño horizontal del píxel del detector, la distancia focal del colimador, el tamaño físico del objetivo rectangular y la Píxeles horizontales ocupados por el objetivo en la imagen.
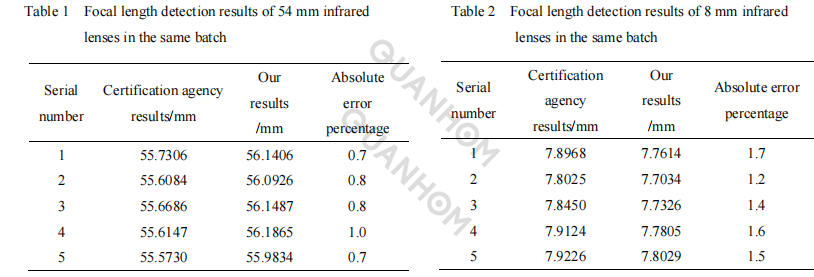
Entre ellos, el tamaño horizontal del píxel del detector, la distancia focal del colimador y el tamaño físico del objetivo rectangular se ven afectados por la precisión del mecanizado de las piezas mecanizadas, y existen ciertos errores, por lo que toda la plataforma de detección debe ser calibrado. La precisión del valor calculado de los píxeles horizontales ocupados por el objetivo en la imagen está relacionada con la distancia focal de la lente de medición.
Una lente infrarroja con una distancia focal grande tiene una resolución de imagen alta y el error estimado tiene poco efecto en el resultado, mientras que una lente infrarroja con una distancia focal pequeña La resolución de la imagen formada por la lente es baja y el error de la estimación tiene una gran influencia en el resultado.
Por lo tanto, al calcular los píxeles horizontales ocupados por el objetivo en la imagen, es necesario realizar un procesamiento de subpíxeles en la imagen para reducir el error de estimación, mejorar la precisión de la estimación del valor y, por lo tanto, mejorar la precisión de la medición de la distancia focal. Cómo mejorar la precisión de la medición de la distancia focal de la lente infrarroja será el siguiente paso del equipo de investigación.
3. Conclusión
Este artículo presenta un método de detección rápida basado en imágenes de la distancia focal de lentes infrarrojas. El resultado de la comparación muestra que el porcentaje de error absoluto promedio de la distancia focal de la lente estimada mediante este método es inferior a 1,48 en relación con el resultado de detección de la distancia focal del organismo de certificación. Se confirma la validez y precisión del método y se sientan las bases para la detección rápida de parámetros importantes de la lente.
Quanhom continúa investigando y desarrollando nuevas tecnologías de detección y evaluando y mejorando con precisión el rendimiento de las lentes ópticas infrarrojas. No solo podemos ofrecer a los usuarios productos de alta calidad, sino también formular soluciones bien pensadas basadas en las necesidades reales de los usuarios.
Como fabricante experimentado deComponentes optoelectromecánicos, Quanhom se compromete a proporcionar a los usuarios una variedad de cámaras térmicas infrarrojas (LWIR, MWIR y SWIR) de excelente calidad. Tenemos una buena reputación en la industria gracias a nuestra tecnología líder en I+D y nuestra excelente tecnología de fabricación. Y nuestros productos se venden en todo el mundo y han recibido elogios y confianza de muchos clientes. Si desea conocer más sobre nuestros servicios relacionados, puede enviarnos sus necesidades y le daremos una respuesta satisfactoria lo antes posible.
Autores: Zhong Jianbo, Li Maozhong, Xia Qingsong, Luo Yongfang, Jia Yuchao, Wang Caiping, Li Hongbing, Luo Hong, Huang Pan
Fuente de la revista: Tecnología infrarroja, Tecnología infrarroja, junio de 2021
Fecha de recepción: 30-04-2019; fecha de revisión: 2021-06-10.
Referencias:
[1] 许士文.红外成像系统测试与评价[M]. Traducción: 红外与激光工程, 2008: 150-180.
[2] Ohtsu N. Un método de selección de umbral a partir de histogramas de nivel de grises [J]. IEEE Transactions on Systems Man & Cybernetics, 1979, 9(1): 62-66.
[3] Imocha Singh, Tejmani Sinam. Contraste local y técnica de umbral basada en la media en la binarización de imágenes [J]. Revista Internacional de Aplicaciones Informáticas, 2012, 51(6): 5-10.
[4] 赵文涛, 曹昕鸷, 田志勇.基于自适应阈值区域生长的红外舰船目标分割方法[J].红外技术, 2018, 40(2): 158-163. ZHAO Wentao, CAO Xinzhi, TIAN Zhiyong. Un método de segmentación de objetivos de barcos por infrarrojos basado en el crecimiento de la región del umbral adaptativo [J]. Tecnología infrarroja, 2018, 40(2): 158-163.
[5] 郝争辉, 张学松, 王高, 等.基于边缘轮廓线提取的自动对焦评价函数[J].红外技术, 2018, 40(2): 170-175. HAO Zhenghui, ZHANG Xuesong, WANG Gao y otros. Función de evaluación de enfoque automático basada en la extracción del contorno del borde [J]. Tecnología infrarroja, 2018, 40(2): 170-175.
[6] Gábor Domokos, Zsolt Lángi, Márk Mezei. Un modelo de evolución de formas bajo transformaciones afines[J/OL][2017-09-18]. arXiv:1604.07630 (https://arxiv.org/abs/1604.07630v2).