
Diseño estructural de una lente de zoom continuo
Principio del sistema de zoom
El objetivo con zoom continuo funciona según el principio de que la distancia focal de su sistema óptico puede cambiarse continuamente dentro de un rango determinado y la posición del plano de la imagen permanece inalterada durante el ajuste de la distancia focal. Cuando no es posible cambiar la potencia focal del sistema óptico directamente, los cambios en la distancia focal solo se pueden lograr ajustando la distancia entre cada grupo de lentes, que es el principio fundamental del sistema óptico con zoom.
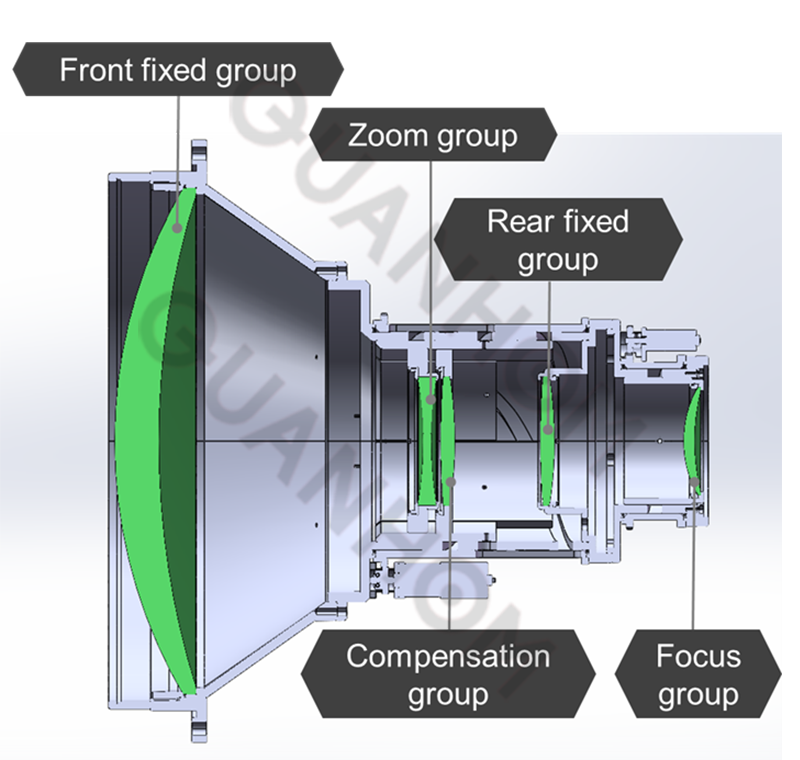
Por lo tanto, en un sistema óptico con zoom, la distancia focal de múltiples grupos de lentes y la distancia entre ellos determinan conjuntamente la distancia focal del sistema. Como se muestra en la figura siguiente, en general, un sistema óptico con zoom consta de cinco componentes: un grupo de lentes fijas delanteras, un grupo de lentes con zoom, un grupo de lentes de compensación, un grupo de lentes fijas traseras y un grupo de enfoque. Por lo tanto, las distancias focales de los múltiples elementos en un sistema óptico con zoom y la distancia entre cada elemento determinan conjuntamente la distancia focal del sistema. Al ajustar la distancia focal, el grupo de lentes con zoom y el grupo de lentes de compensación se mueven en la dirección correspondiente de acuerdo con los parámetros de diseño óptico, con el fin de cambiar la distancia entre las lentes para lograr un cambio en la distancia focal.
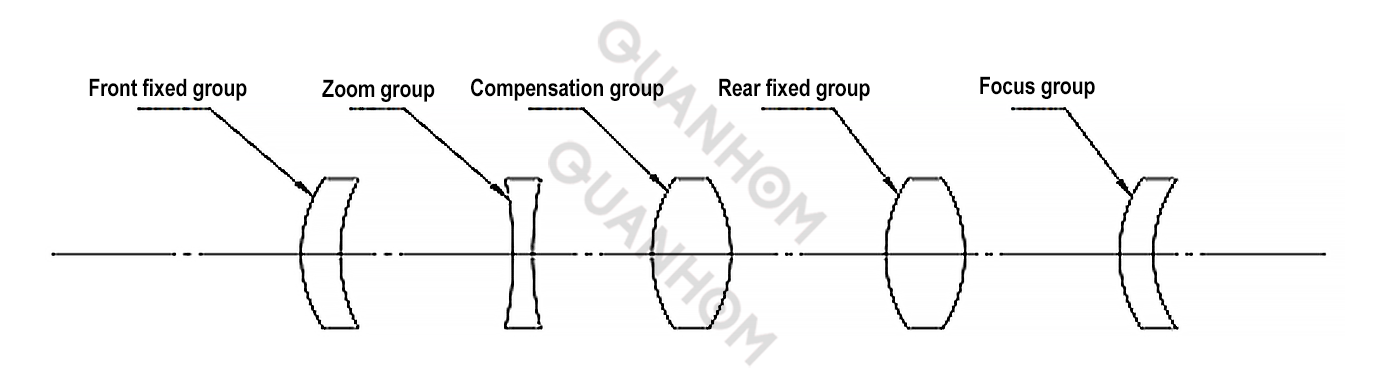
Tomemos como ejemplo el GCZ103013D : su número F es de 0,85-1,3 y la longitud focal es de 30-300 mm. Se trata de un sistema de transmisión óptica que comprende cinco grupos de lentes: un grupo fijo frontal, un grupo de zoom, un grupo de compensación, un grupo fijo trasero y un grupo de enfoque. El grupo de zoom realiza un movimiento lineal, mientras que el grupo de compensación experimenta un movimiento no lineal relativamente pequeño para mantener una imagen nítida durante todo el proceso de zoom. El grupo de enfoque realiza un movimiento lineal para ajustar el enfoque en respuesta al desenfoque causado por los cambios de temperatura.
(I) Cálculo de la curva de leva para el sistema
Una vez determinados los parámetros de estructura óptica (radio, espaciado, material) de cada grupo de lentes, también es necesario calcular el desplazamiento del grupo de zoom y del grupo de compensación, para procesar la pista de la leva.
Según la óptica gaussiana, supongamos que la distancia de movimiento del grupo de zoom es x. Para garantizar que el plano de la imagen se mantenga estable, el desplazamiento y del grupo de compensación se puede calcular mediante:

En la fórmula: d s23 es el intervalo entre el grupo de zoom y el grupo de compensación en la distancia focal corta; f 2 ' es la distancia focal del grupo de zoom; f 3 ' es la distancia focal del grupo de compensación; l 2 ' es la distancia de la imagen del grupo de zoom; l 3 ' es la distancia de la imagen del grupo de compensación. Elimine la distancia del objeto del grupo de zoom l 2 * en las dos fórmulas anteriores. La fórmula simplificada es la siguiente:

En la fórmula:

Solución:

El desplazamiento de compensación y toma la raíz con el valor absoluto más pequeño. Si no hay una raíz real de y durante el movimiento del grupo de zoom, indica una ruptura en la curva, lo que hace imposible el zoom continuo. Entonces es necesario recalcular, ajustar, optimizar, etc. el sistema óptico.
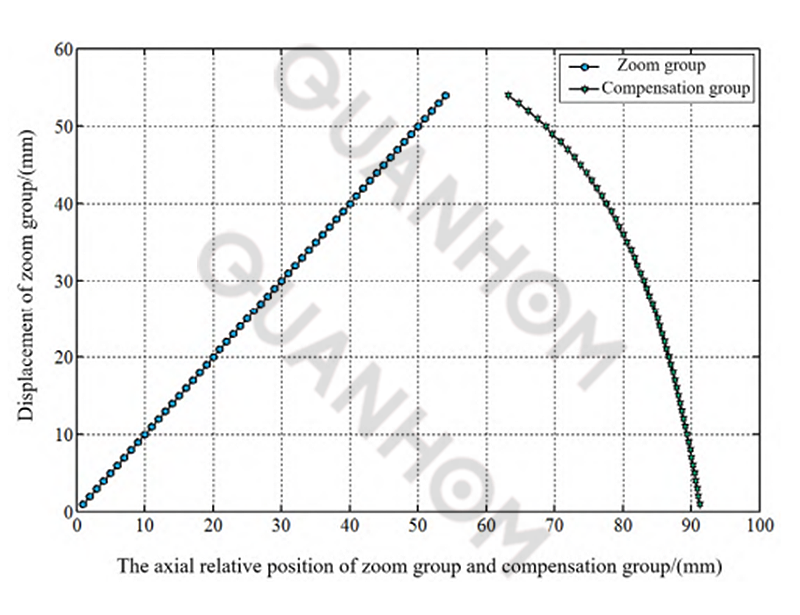
Según la fórmula de solución anterior, la curva de leva del sistema de zoom se muestra en la figura. Se puede ver que la carrera máxima del grupo de zoom es de 54 mm y la carrera máxima del grupo de compensación es de 27,5 mm; la curva del grupo de compensación cambia suavemente y los dos grupos de curvas se pueden utilizar para el procesamiento de la pista de leva.
(II) Diseño del mecanismo de zoom
La leva de zoom gira sin espacios bajo la acción de la bola y el anillo de retención de la leva, lo que reduce de manera efectiva el par de salida del motor al convertir la fricción de deslizamiento en fricción de rodadura. Cuando el motor impulsa la leva para que gire, la leva transmite el movimiento a la corredera de zoom y a la corredera de compensación a través del pasador guía. Bajo la guía de ranuras rectas en el tubo de lente principal, la corredera de zoom y la corredera de compensación convierten el movimiento de rotación de la leva en un movimiento paralelo de la corredera a lo largo de la dirección del eje óptico, logrando así el zoom. La ranura de la curva de zoom y la ranura de la curva de compensación en la leva se procesan con precisión para garantizar que los movimientos de zoom y compensación se correspondan entre sí punto por punto, manteniendo la claridad durante el zoom continuo.
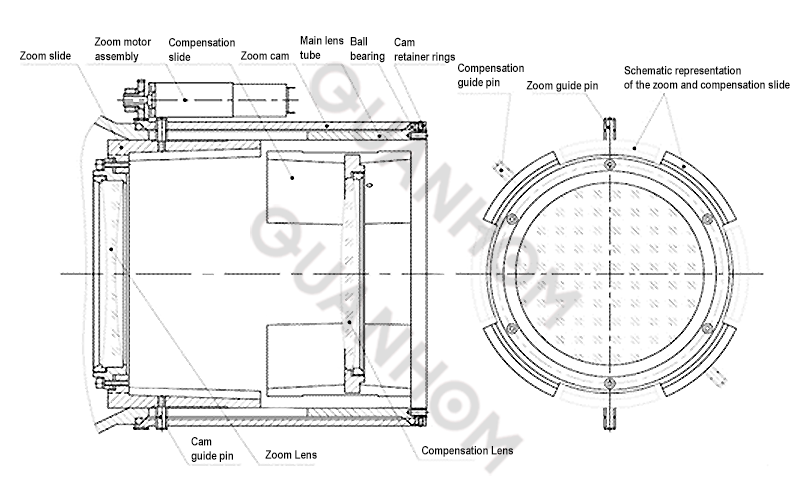
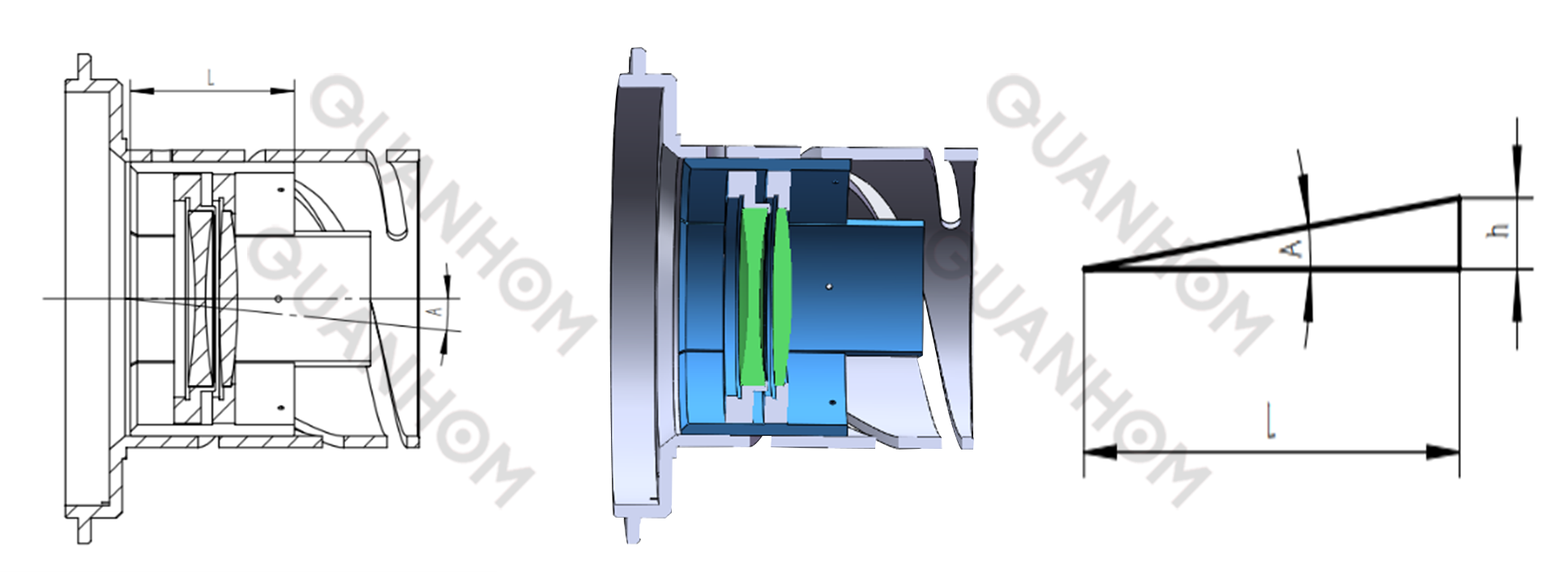
Dado que el sistema requiere que la consistencia del eje óptico sea menor que A durante el proceso de zoom, la longitud efectiva de coincidencia de la corredera de zoom, la corredera de compensación y el tubo de lente principal es L mm, y el espacio entre la corredera y el tubo debe ser menor que h = L × tan (A). Por lo tanto, se requiere que la corredera de zoom y la corredera de compensación coincidan con el tubo de lente principal, y el espacio se controla dentro del rango de h para garantizar un movimiento suave de la corredera de zoom y la corredera de compensación al mismo tiempo que se cumplen los requisitos de estabilidad del eje óptico.
(III) Análisis de elementos finitos de levas
De acuerdo con los requisitos de adaptabilidad ambiental, la lente debe soportar una fuerza de impacto máxima de 10 g, asegurando que la deformación de la corredera y la leva permanezca dentro del rango de error ópticamente permisible para cumplir con los requisitos de rendimiento. La corredera de zoom, la corredera de compensación y la leva están hechas de aluminio superduro 7A09, con un coeficiente de Poisson de 0,33, un módulo elástico de 73 GPa, un límite elástico de ≥400 MPa y una densidad de 2,78 × 10-6 kg/mm3. El conjunto de zoom pesa 0,4 kg, el conjunto de compensación pesa 0,4 kg y la leva pesa 0,5 kg.
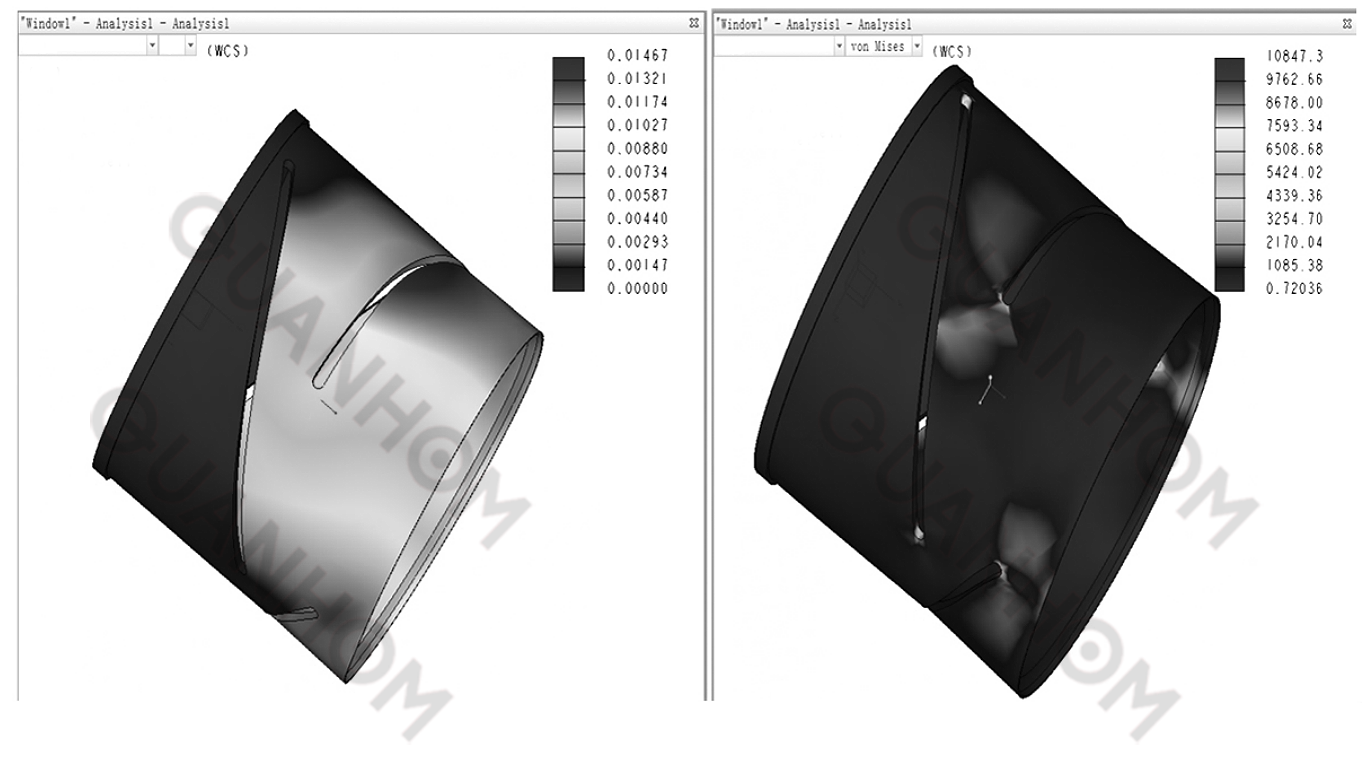
Dadas las características estructurales, la leva experimenta la fuerza axial máxima a través de los pasadores guía durante los choques. Para la fuerza axial de la leva, cada ranura de curva de leva experimenta una fuerza axial de 10×0,4/2 kg = 20 N, y el extremo de soporte axial de la leva experimenta una fuerza de reacción de 10×(0,4+0,4+0,5) kg = 130 N. Se aplica un desplazamiento fijo en el extremo de soporte de la leva para el análisis estático. Los resultados del análisis se muestran en la figura siguiente. La deformación máxima es de 0,01467 mm, que está dentro del rango de deformación ópticamente admisible. La tensión máxima es de 10,85 MPa <límite elástico de 400 MPa, por lo que la resistencia de la leva cumple con los requisitos.
(IV) Análisis de elementos finitos del tobogán
(IV) Análisis de elementos finitos del tobogán
Debido a las características estructurales, la corredera de zoom y la corredera de compensación experimentan una deformación máxima bajo fuerzas radiales, con una fuerza máxima de 10 × 0,4 kg = 40 N. Se aplica un desplazamiento fijo al diámetro interior de la corredera para el análisis estático. Los resultados del análisis se muestran en la siguiente figura. La deformación máxima de la corredera de zoom es de 0,00683 mm, la tensión máxima es de 3,2 MPa, mientras que la deformación máxima de la corredera de compensación es de 0,00135 mm y la tensión máxima es de 1,47 MPa. La deformación se incorpora al software óptico para la simulación y casi no tiene efecto en la imagen. Por lo tanto, la resistencia de la corredera de zoom y la corredera de compensación cumple con los requisitos.
(V) Verificación de la resistencia del pasador guía del zoom
Cada conjunto de zoom y compensación pesa 0,4 kg y la fuerza de impacto máxima es de 40 N bajo un impacto de 10 g. Cada pasador guía experimenta una fuerza de corte máxima de 20 N. El área de sección transversal mínima del pasador guía es de 4,52 × 10-4 m2 y está hecho de latón HPb59-1, y la tensión de corte admisible es de 200 MPa.
La tensión cortante máxima en el pasador guía es: T = 20/(4,52 × 10-4), Pa = 4,42 × 104Pa <200MPa, por lo que la resistencia del pasador cumple con los requisitos.
